Les robots parallèles à câbles se rapprochent des applications industrielles
Peu communs, les robots parallèles à câbles parviennent à manipuler de lourdes charges dans de grands espaces. Leur déploiement est cependant freiné par l’absence de normes de sécurité dédiées. Une équipe nantaise travaille à y remédier.
La cobotique est l’art et la science de faire collaborer robots et humains en toute sécurité. En évitant les collisions accidentelles, elle permet d’enlever les grilles et de réduire les zones interdites dans les usines et les laboratoires. La question est aisément abordée avec de petits robots aux mouvements limités, mais ce n’est pas ce qui intéresse Stéphane Caro.
Directeur de recherche CNRS au laboratoire des Sciences du Numérique de Nantes1 et membre de l’Institut de Recherche Technologique Jules Verne, Stéphane Caro dirige l’équipe Robots and machines for manufacturing, society and services (RoMas), spécialisée dans la robotique dédiée à la fabrication industrielle dans de grands espaces. Une tâche à laquelle excellent les robots parallèles à câbles (RPC). Les RPC présentent également une efficacité énergétique supérieure d’au moins 25 % à celle des robots classiques.
Des robots particuliers
« Le terme de robot parallèle appartient au jargon de la communauté, où l’on distingue deux principaux types d’architecture, précise Stéphane Caro. D’abord les robots sériels, dont les moteurs sont montés en série et dont la chaîne cinématique est ouverte : c’est-à-dire que leurs segments et leurs articulations forment une chaîne dont une des extrémités est libre. Ce sont les machines les plus répandues, avec par exemple les robots anthropomorphes ou les bras articulés. À l’inverse, un robot parallèle est composé de plusieurs chaînes cinématiques fermées. »
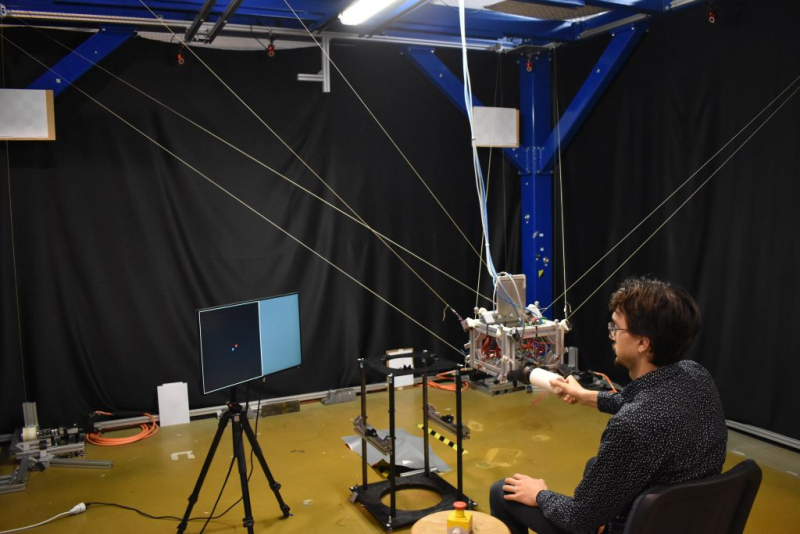
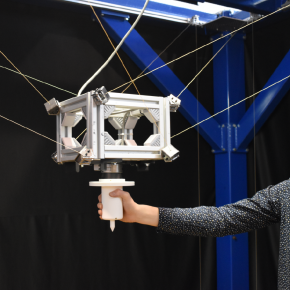
Les PRC sont ainsi constitués d’une plateforme mobile, commandée en translation et en rotation par un système de câbles mobiles, accrochés à un cadre fixe. Ces derniers actionnent les mouvements en tirant, mais ne peuvent pas pousser. Ce principe permet de transporter dans de grands volumes des pièces pouvant être particulièrement lourdes et encombrantes. « Le robot les manipule à la manière d’une marionnette, explique Stéphane Caro. L’exemple le plus connu se retrouve dans les stades, où certaines caméras circulent librement au-dessus du terrain grâce à des câbles. »