Conférence FutuRobot
Demain, les robots seront au cœur de notre quotidien. Ils vous intriguent, vous fascinent, vous passionnent, vous effraient ? Le CNRS propose FUTUROBOT, une série d’événements dédiés à la robotique pour rencontrer les scientifiques, découvrir leurs recherches et leur poser vos questions.
Regarder la conférence en replay :
Le 25 mai, à l’occasion des Mardis de l’Espace des sciences, trois chercheurs issus de laboratoires CNRS aborderont divers aspects de la robotique actuelle, de la recherche aux enjeux sociétaux, le tout en une quinzaine de minutes chacun.
- Sophie Sakka, maîtresse de conférences à l’École Centrale de Nantes et chercheuse au Laboratoire des sciences du numérique à Nantes (LS2N, CNRS/Ecole Centrale de Nantes/IMT Atlantique/Université de Nantes)
La robotique : un outil pour l'accompagnement thérapeutique de personnes en situation de handicap cognitif
Un robot est un médiateur intermédiaire entre un objet inerte et un être animé, simplifié, auquel notre imaginaire peut donner vie. Cette caractéristique paradoxale en fait un outil particulièrement efficace pour l'accompagnement thérapeutique de personnes en situation de handicap cognitif, les amenant dans un monde où elles peuvent être en même temps actrices et spectatrices de leurs actions. L'interaction avec les machines étant acceptée quand celle avec les humains est difficile ou en échec, il est alors possible d'amplifier considérablement les effets d'une thérapie. Reste à comprendre quels mécanismes psychiques le robot permet d'actionner chez les êtres humains, et comment définir son apparence, ses caractéristiques et son usage pour améliorer les effets. Des exemples d'expériences menées avec des adolescents présentant des troubles du spectre autistique ou des personnes souffrant de la maladie d'Alzheimer illustrent les possibilités qu'offre cette nouvelle technologie dans le cadre de l'accompagnement thérapeutique.

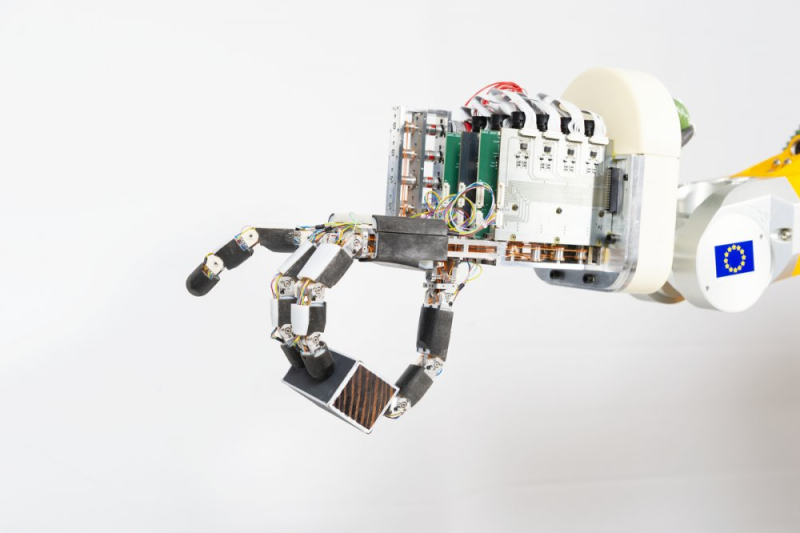
- Jean-Pierre Gazeau, ingénieur de recherche CNRS à l’Institut P' : Recherche et ingénierie en matériaux, mécanique et énergétique (Pprime, CNRS)
La robotique : l’exécution de tâches complexes et la co-manipulation avec l’Homme
Les robots sont amenés à cohabiter de plus en plus avec l'homme pour réaliser de nombreuses activités de service que ce soit en milieu industriel ou sociétal. Dans ce cadre, la sécurité et la facilité d'emploi pour l'exécution de tâches complexes - notamment de manipulation fine ou de co-manipulation avec l'homme - sont des facteurs clés pour le développement de leur utilisation à grande échelle.
Les préhenseurs équipant les manipulateurs mobiles actuels ne répondent pas à ces exigences de sécurité, de flexibilité et de facilité d'emploi. Ce sont soit des préhenseurs trop simples, qui manquent de flexibilité, soit des préhenseurs anthropomorphes trop complexes pour sortir des laboratoires.
Aussi malgré les progrès scientifiques et le saut technologique qui se sont produits durant la dernière décennie, que ce soit en mécanique, en électronique ou en informatique, les chercheurs sont aujourd'hui encore loin d'avoir conçu la main robotique capable de se substituer à la main humaine dans la réalisation des tâches que celle-ci est capable de produire. Un travail important est à conduire aussi bien sur le plan de la conception (miniaturisation, instrumentation, actionnement), que sur le plan de la commande et donc de la capacité de la main robotique à interagir en temps réel avec son environnement dans des contextes opératoires de plus en plus complexes et variables.
- Luc Jaulin, professeur à l’ENSTA Bretagne et chercheur au Laboratoire des sciences et techniques de l'information, de la communication et de la connaissance (Lab-STICC, CNRS/ENI Brest/ENSTA Bretagne/IMT Atlantique - Institut Mines-Telecom/Université Bretagne occidentale/Université Bretagne sud)
La robotique : l’exploration sous-marine
L'homme effectue dans l'océan de nombreuses missions longues et périlleuses comme le transport de marchandises, la construction d'infra-structures offshore, la recherche d'épaves, etc. Du fait de la pénibilité, du coût, et de la dangerosité de ces missions, les robots marins y sont de plus en plus utilisés. De nos jours, ils le sont principalement pour la prise de mesures, la construction de cartes sous-marines, la recherche de mines ou l'étude des courants marins. Afin d'éviter les collisions avec le trafic en surface, on demande généralement aux robots de rester sous l'eau et de ne jamais refaire surface. La localisation devient difficile et même souvent impossible du fait de l'absence d'amers (points de repère à terre utilisés pour se repérer en mer) et du non fonctionnement du système de Géolocalisation et navigation par un système de satellites (GNSS). En mimant les techniques des anciens navigateurs, ou des animaux marins (comme les tortues marines), un robot sous-marin peut explorer un environnement très vaste et revenir à sa position initiale, sans pour autant être capable de se géolocaliser.
